

Abstract.
System calibration and strip alignment are essential for obtaining high-quality LiDAR data in a laser scanning system. Each of these procedures enhances the accuracy of the entire system and increases its usability. This article explores the sources of LiDAR system errors, the importance of calibration, and proper calibration methods. The sections covered include an Introduction to the Calibration Procedure, Boresight Calibration, Strip Alignment, and the Benefits of Proper Calibration. The conclusion will summarize the benefits of proper calibration.
Introduction to Calibration Procedure
The laser scanning system comprises LiDAR, a GNSS (Global Navigation Satellite System) receiver, and an IMU (Inertial Measuring Unit). LiDAR determines the distance to objects, INS determines the system’s orientation, and the GNSS receiver allows you to choose the system’s coordinates in a global coordinate system, such as ENU (East North Up).
LiDAR users need to perform calibration maneuvers after assembling their system. Boresight calibration is often standard for UAV-based LiDAR solutions such as RESEPI Payload but can also be carried out by car. It must be noted that calibration on a UAV is preferable because it is not always possible to perform special calibration maneuvers in a car due to the terrain or obstacles.
Planning a mission with a predetermined trajectory is very common when using UAVs. The trajectory is selected based on the required scanning area, LiDAR Field of View (FOV), and flight altitude. In this case, each span will visually look like a separate strip, the overlap of which should be at least 20% (Figure 1).

Figure 1: Flight path, scan stripes, and strip overlap are highlighted in red.
A boresight misalignment occurs when there is an imprecision in the angles measured between the INS and LiDAR. Minor errors in the heading, roll, and pitch angles usually do not matter if the orientation of the object’s location is determined. However, for LiDAR, the distance to objects can reach 10 – 200 m. And even a tiny angular inaccuracy can lead to significant distortions in point clouds. For example, if the error along one of the axes is 0.1 degree, then at a distance of 50 m, the mistake in determining the coordinate will be about 17.5 cm.
Most often, boresight calibration is data-driven. To do this, a calibration flight/trip with special maneuvers ensures good IMU heading observability and features for errors in all axes (Figure 2.3).

Figure 2. Flight path.

Figure 3. Trajectory for a car.
Boresight is calibrated manually or via special software, as shown in Figure 4.
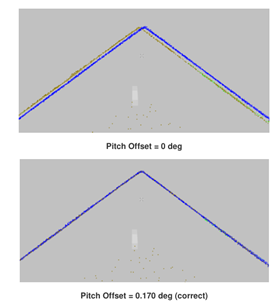
Figure 4. Roof profile before and after pitch calibration.
The main questions in this case for the user are:
- Is it necessary to process point clouds to reduce errors?
- Will additional software be required to apply these changes?
Before answering these questions, it is essential to understand the sources of error to comprehend the principles behind LiDAR boresight calibration better.
Boresight Calibration
Figure 5 shows a geometric image of georeferencing LiDAR [1].
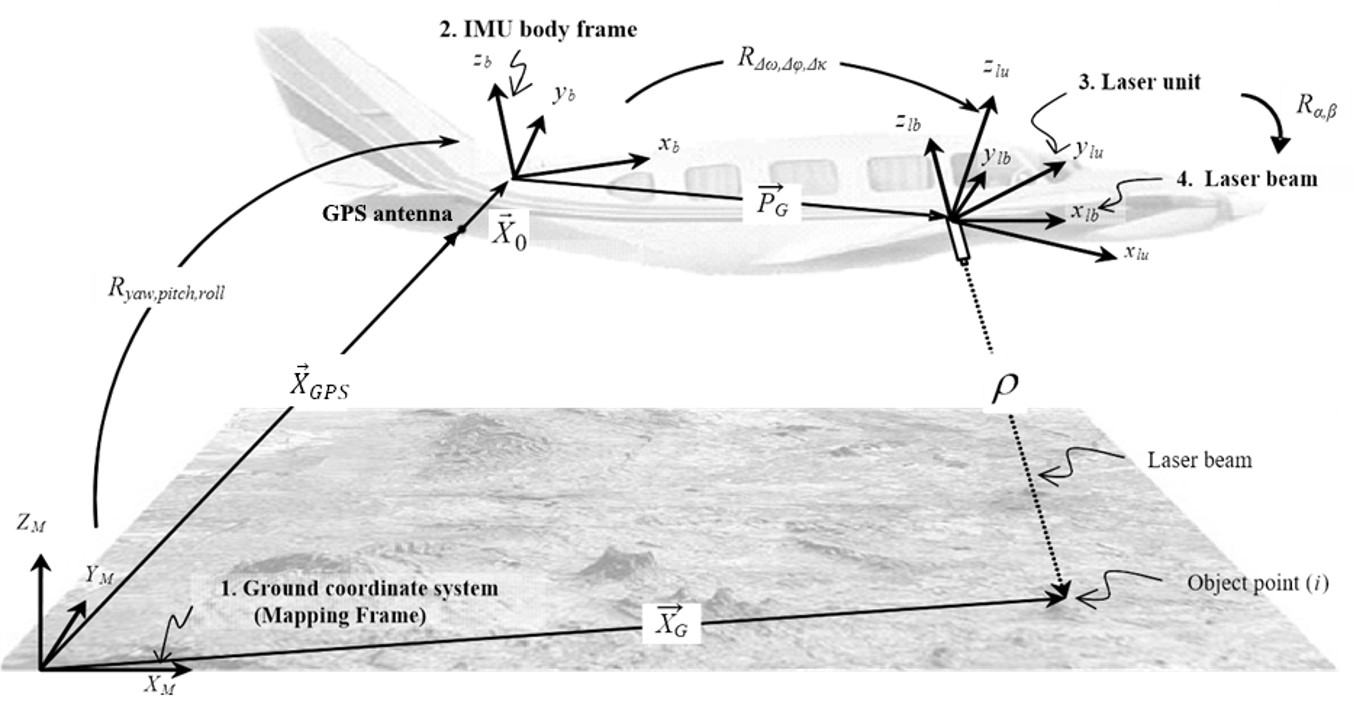
Figure 5. Geometric georeferencing image LiDAR.

Where:
![]() – Georeferenced position of the laser point. The position can be derived through the summation of four vectors,
– Georeferenced position of the laser point. The position can be derived through the summation of four vectors, ![]() ,
, ![]() ,
, ![]() and , after applying the appropriate rotations,
and , after applying the appropriate rotations, ![]() ,
, ![]() and
and ![]() . RESEPI Payload can additionally project geographic coordinates on a plane, thus providing a point cloud with cartographic reference, which is convenient for building digital maps (e.g., UTM projection) [2].
. RESEPI Payload can additionally project geographic coordinates on a plane, thus providing a point cloud with cartographic reference, which is convenient for building digital maps (e.g., UTM projection) [2].
![]() – is the vector from the GPS to the IMU coordinate system.
– is the vector from the GPS to the IMU coordinate system.
![]() – is the vector from the ENU to the GPS antenna position.
– is the vector from the ENU to the GPS antenna position.
![]() – is the vector offset between the LiDAR and IMU coordinate systems (lever-arm offsets).
– is the vector offset between the LiDAR and IMU coordinate systems (lever-arm offsets).
![]() – is the laser range vector whose magnitude is equivalent to the distance from the laser firing point to its footprint.
– is the laser range vector whose magnitude is equivalent to the distance from the laser firing point to its footprint.
![]() – the rotation matrix relating the ENU and IMU coordinate systems.
– the rotation matrix relating the ENU and IMU coordinate systems.
![]() – the rotation matrix relating the IMU and LiDAR coordinate systems (bore-sighting angles).
– the rotation matrix relating the IMU and LiDAR coordinate systems (bore-sighting angles).
![]() – refers to the rotation matrix relating the laser unit and laser beam coordinate systems, with α and β being the mirror scan angles.
– refers to the rotation matrix relating the laser unit and laser beam coordinate systems, with α and β being the mirror scan angles.
Mechanically, it isn’t easy to precisely know the relative orientation of the LiDAR to the IMU ( ![]() and
and ![]() the remaining misalignment needs to be estimated computationally through a calibration procedure).
the remaining misalignment needs to be estimated computationally through a calibration procedure).
Knowing the basic geometry and components that are responsible
Knowing the basic geometry and components that determine an object’s coordinates by LiDAR, let’s consider the key points that influence the practical use of LiDAR in the system:
1) GPS-IMU lever. The RESEPI Payload was strategically designed for multiple application bases with mounting options for mobile vehicles, DJI-supported drones (DJI M300, M600 Pro), custom drones, handheld platforms, vehicles, the Freefly Alta-X, and many more. Therefore, the GPS antenna can be fixed where the drone geometry allows it, primarily if the user uses a custom solution. The antenna offset value relative to the IMU can be measured manually by the user, but this practice often leads to significant errors. Therefore, a solution has been integrated into the post-processing software that automatically calculates the antenna offset with an accuracy of less than 1 mm.
2) IMU linear and angular offset – LiDAR. This is a known calibrated value that was previously stored in RESEPI Payload.
3) LiDAR FOV: Modern LiDARs often have a 360-degree horizontal rotation (α) and multiple lasers in a vertical channel (β). For instance, in the case of RESEPI XT-32, α = 360° and β = 32° [3]. This setup implies the 32 vertical channel lasers rotate 360° in azimuth. Each laser necessitates individual calibration, with these calibrated values being previously stored in the RESEPI Payload.
4) PPK solution for GPS data. Several factors determine the quality of the solution:
- Conditions for receiving a GPS signal.
- Antenna quality
- Flight conditions
5) Determination of orientation angles. This directly relates to the IMU on which the INS is built. The accuracy of determining angles (roll, pitch, yaw) usually depends directly on the IMU class. In the RESEPI Payload, the best IMU determines angles with high accuracy and is resistant to vibration.
Once the key points have been identified, two of the five factors—the PPK solution for GPS data and the INS orientation—cannot be pre-calibrated.
Therefore, to improve data quality, PCMasterPro implements a PPK post-processing solution that automatically reduces errors associated with GPS and INS, allowing for position accuracy of about 0.5 cm, Heading accuracy of 0.03°, and Pitch/Roll accuracy of 0.006° (Figure 6). This is due to the IMU class, specifically in values for bias and scale factor (gyroscopes and accelerometers) for Inertial Labs’ IMU.
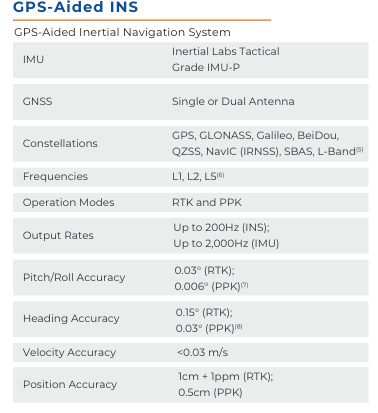
Figure 6. Accuracy of orientation and position angles.
However, residual errors can still affect the quality of point cloud construction. Therefore, strip alignment can be used to reduce residual errors.
Strip Alignment
The strip alignment procedure is used if the system has undergone boresight calibration and residual divergences are observed in strip overlap areas. This issue often results from an incorrect calibration mission.
– Bad weather conditions and strong winds cause high angular rates and poor heading, pitch, and roll observability.
– Incorrect flight altitude. The laser beam divergence specifications do not favor longer ranges over shorter ones. This can create uncertainty and errors in overlapping areas between passes.
– Using manual drone control instead of autopilot causes instability when estimating heading, pitch, and roll.
– The quality of GNSS signal reception and the number of visible satellites, both by the base station and the payload. Suppose the user uses CORS network data instead of the base station for post-processing. In that case, it should be considered that sometimes CORS data doesn’t always record at the optimal frequency, and it doesn’t always record every constellation.
– Incorrect flight path
Let’s look at an example of a calibration mission for the RESEPI XT-32. Each RESEPI Payload undergoes a calibration flight to correct boresight. After the flight, the data is processed in PCMasterPro. Based on a combination of physical and computational measurements conducted by Inertial Labs, the angles and linear displacements of the LiDAR and camera relative to the IMU are implemented into the project. An example is shown in Figure 7.
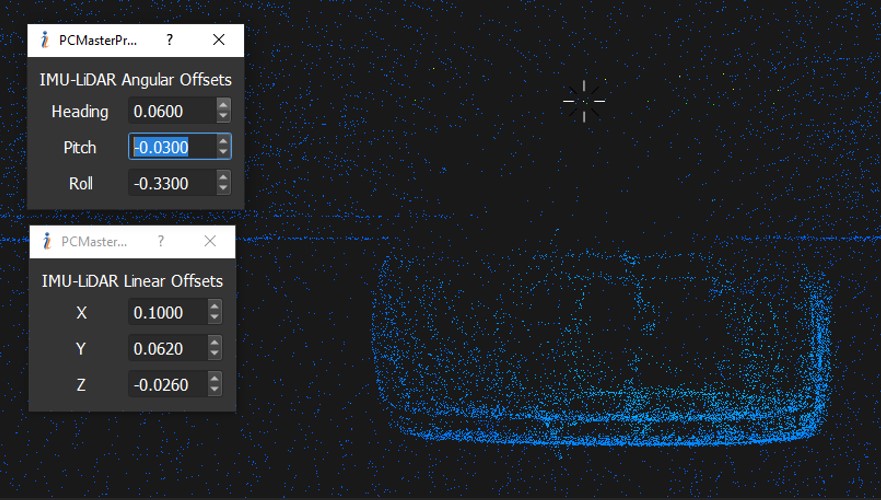
Figure 7. Boresighting calibration process in PCMasterPro.
As shown in Figure 8 on the left, a cloud of points is displayed before and after calibration. The scanned objects are stratified into two parts, although one line should visually represent them.
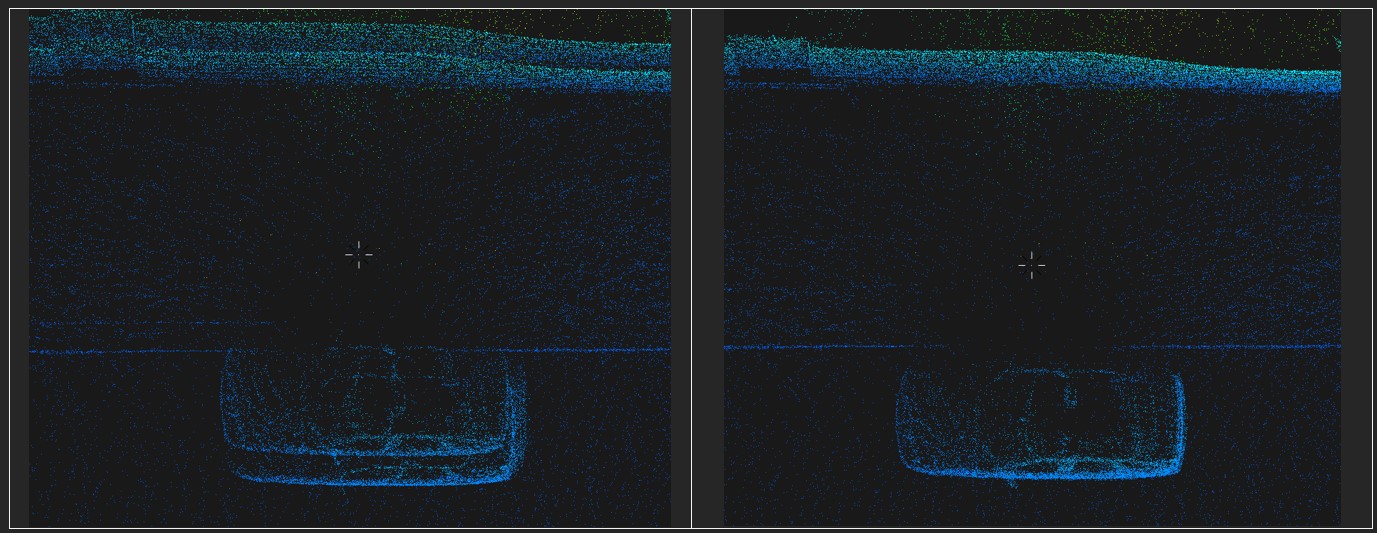
Figure 8. Point cloud before and after calibration in PCMasterPro.
As mentioned earlier, many modern LiDARs used for aerial scanning now have several lasers in a vertical channel, Figure 9.
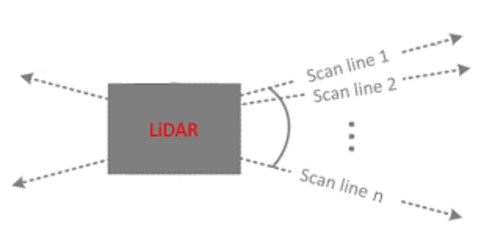
Figure 9. Schematic representation of the lidar vertical channel.
For the RESEPI XT-32, a file with adjustments for each laser is available on the manufacturer’s website. However, the IMU-LiDAR angular offsets will affect all lasers in the point cloud. Therefore, in PCMasterPro, you can manually set the correct azimuth and elevation angles and further refine them beyond the LiDAR manufacturer’s specifications, as illustrated in Figure 10.
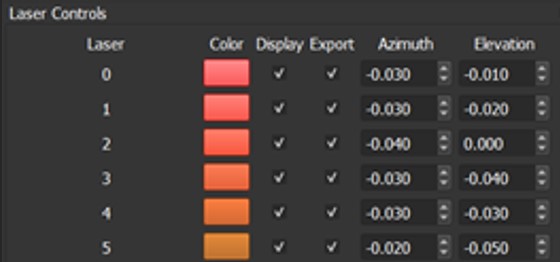
Figure 10. Azimuth and elevation settings window for each laser in PCMasterPro.
Changes in laser parameters during the setup process affect the point cloud. Objects like roofs or fences are displayed as thin lines without stratification, as shown in Figure 11.
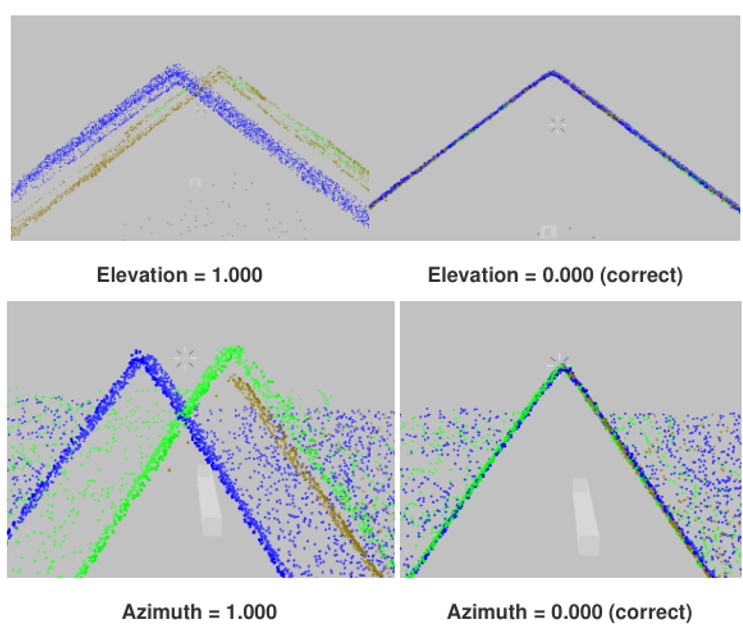
Figure 11. The result of calibrating individual lasers for azimuth and elevation was used as an example of a roof section.
A repeat mission can be done with a single calibration. However, ready-made strip alignment or boresight calibration solutions are recommended for efficiency in mass production. For example, BayesStripAlign can be integrated into PCMasterPro [4]. Other third-party tools, like LiDAR360, provided with RESEPI, offer additional features for quick alignment and processing of LiDAR strips, as depicted in Figure 12 [5]. Processing data in specialized software can save time and eliminate the need for repetitive missions.
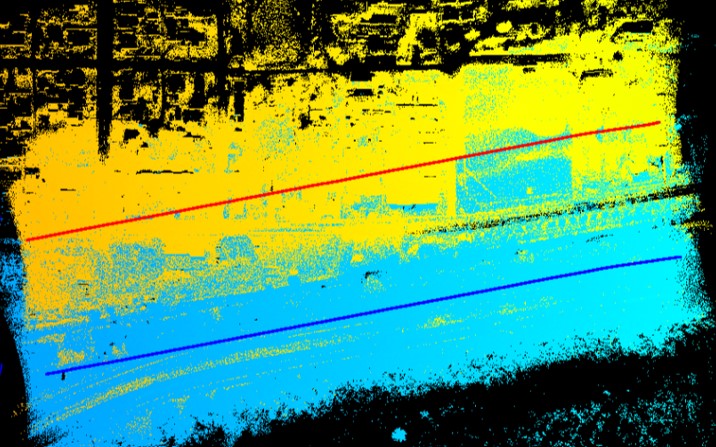
Figure 12. Strip alignment in LiDAR360.
Benefits of Proper Calibrations
As seen from the calibration results figures, the collected LiDAR data can have significant errors due to systematic and random errors.
These errors render a point cloud obtained from an uncalibrated system unusable.
After reviewing the calibration procedure, it is essential to calibrate the system and correctly identify the errors affecting accuracy. Let’s move on to identifying the key benefits of proper calibration:
1) Boresight calibration – calibration of LIDAR azimuth and elevation angles:
- Reduced error in determining LiDAR elevation angles
- Increase the accuracy of point cloud construction
2) Strip alignment – calibration of LiDAR to IMU angular offsets:
- Compensation of residual divergence after boresight calibration
- Strip alignment in the point cloud eliminates cloud stratification
Thus, proper calibration makes a LiDAR-based data acquisition system usable and provides a high-precision georeferenced point cloud.
Conclusion
Proper calibration is crucial for the successful utilization of the LiDAR payload. The laser scanning system will be unusable without proper boresight calibration and strip alignment. Regardless of the system’s accuracy, errors between the LiDAR, GNSS receiver, and IMU will significantly impact the point cloud’s accuracy. As the distance to objects can range from 10 to 200 meters for LiDAR, even with a high-quality IMU, it can lead to a coordinate error of tens of centimeters. Consequently, the full potential of individual components will not be realized.
An equally important step is to reduce residual divergences after calibration. These residual divergences lead to point cloud stratification, even if the coordinate accuracy is 1-2 centimeters.
Proper calibration conditions are crucial for improving the accuracy of the entire system, boresight calibration, and strip alignment procedures, making the laser scanning system more versatile. The result is highly accurate and precise point clouds for the user.
Whether hardware or software is needed, RESEPI from Inertial Labs offers solutions to produce accurate and precise point clouds. With RESEPI Payload, the user can create accurate centimeter point clouds with a map projection of coordinates.
References
[1] Bang, Ki, et al. LiDAR System Calibration Using Point Cloud Coordinates in Overlapping Strips. American Society for Photogrammetry and Remote Sensing Annual Conference. 2009, pp. 2009–2010.
[2] “Universal Transverse Mercator Coordinate System.” Wikipedia, 10 May 2021, en.wikipedia.org/wiki/Universal_Transverse_Mercator_coordinate_system.
[4] Strip Alignment – BayesMap Solutions. bayesmap.com/products/bayesstripalign/.
[5] “LiDAR360 Software and Real-Time Point Cloud Display.” Www.greenvalleyintl.com, www.greenvalleyintl.com/LiDAR360/.