
Abstract
This article discusses the key factors to consider when selecting an Inertial Navigation System (INS) for mobile mapping. Five key aspects are highlighted: accuracy level, cost, compatibility with other sensors, and system functionality. The calibration issue is also touched upon as an essential component affecting accuracy. It is emphasized that balancing the required accuracy and cost is crucial, avoiding overpaying for unnecessary features or high accuracy that is not critical to the application.
The sections will cover Introduction to INS, INS selection criteria for mobile mapping, and Mobile mapping INS from Inertial Labs. The conclusion will summarize the benefits of using Inertial Labs’™ solutions for mobile mapping.
Section 1. Introduction to INS
An inertial navigation system (INS) is a device that uses gyroscopes and accelerometers (the main components of an inertial measurement unit – IMU), and sometimes magnetometers, to calculate an object’s orientation angles, position, and velocity without relying on external data sources [1].
The operating principle of an INS involves accelerometers measuring the acceleration (“Accel”) of the object along different axes (typically three mutually perpendicular axes – X, Y, and Z). In contrast, gyroscopes measure the angular velocity (“Gyro”) of the object’s rotation relative to these axes, as shown in Figure 1. This enables the tracking of changes in the object’s spatial orientation. [2].
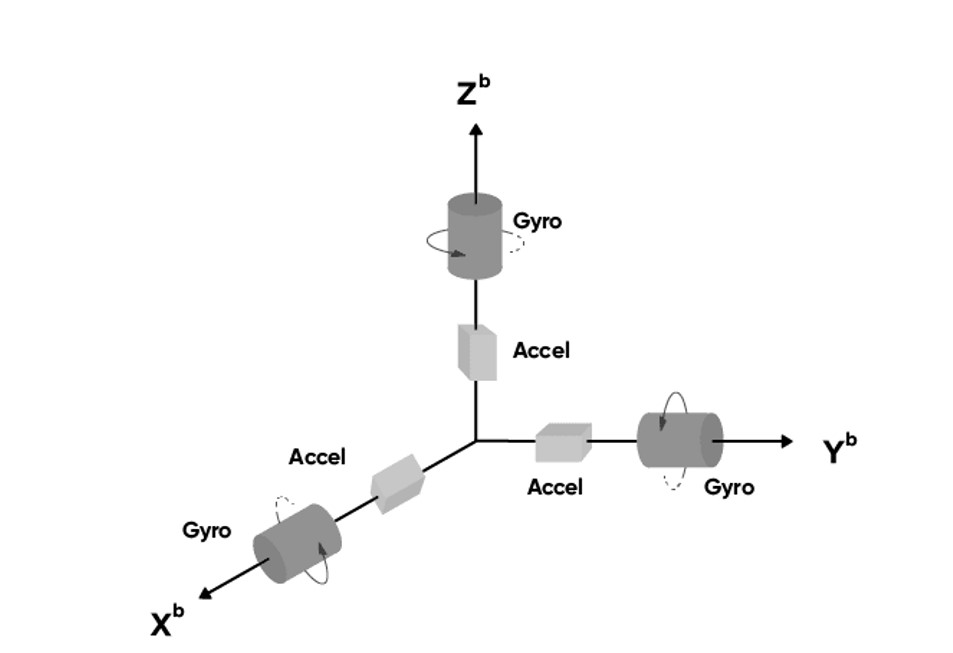
Figure 1. Location of gyroscopes and accelerometers in the IMU.
Initially, the accelerometers measure acceleration, which is then integrated over time to find the object’s velocity. This velocity is further integrated to compute the object’s current position in space. Gyroscope signals are also integrated to determine the orientation angles, including pitch, roll, and yaw.
Because inertial sensors can experience errors like gyro drift and accelerometer noise, filters such as the Kalman filter are applied to reduce these errors and correct drifts [3]. The INS is often combined with a GNSS system to address these inaccuracies and correct accumulated errors. However, when the GNSS signal is lost for an extended period, the errors increase, which becomes particularly significant over long distances. Therefore, while the INS is suitable for autonomous navigation, additional correction techniques are necessary to maintain accuracy[4].
Now that we have reviewed the basic principles of INS operation let us examine the criteria for selecting INS for mobile mapping. Those readers who want to understand the work of INS better can find more information at the links [5, 6].
Section 2. INS selection criteria for mobile mapping
Data accuracy and stability
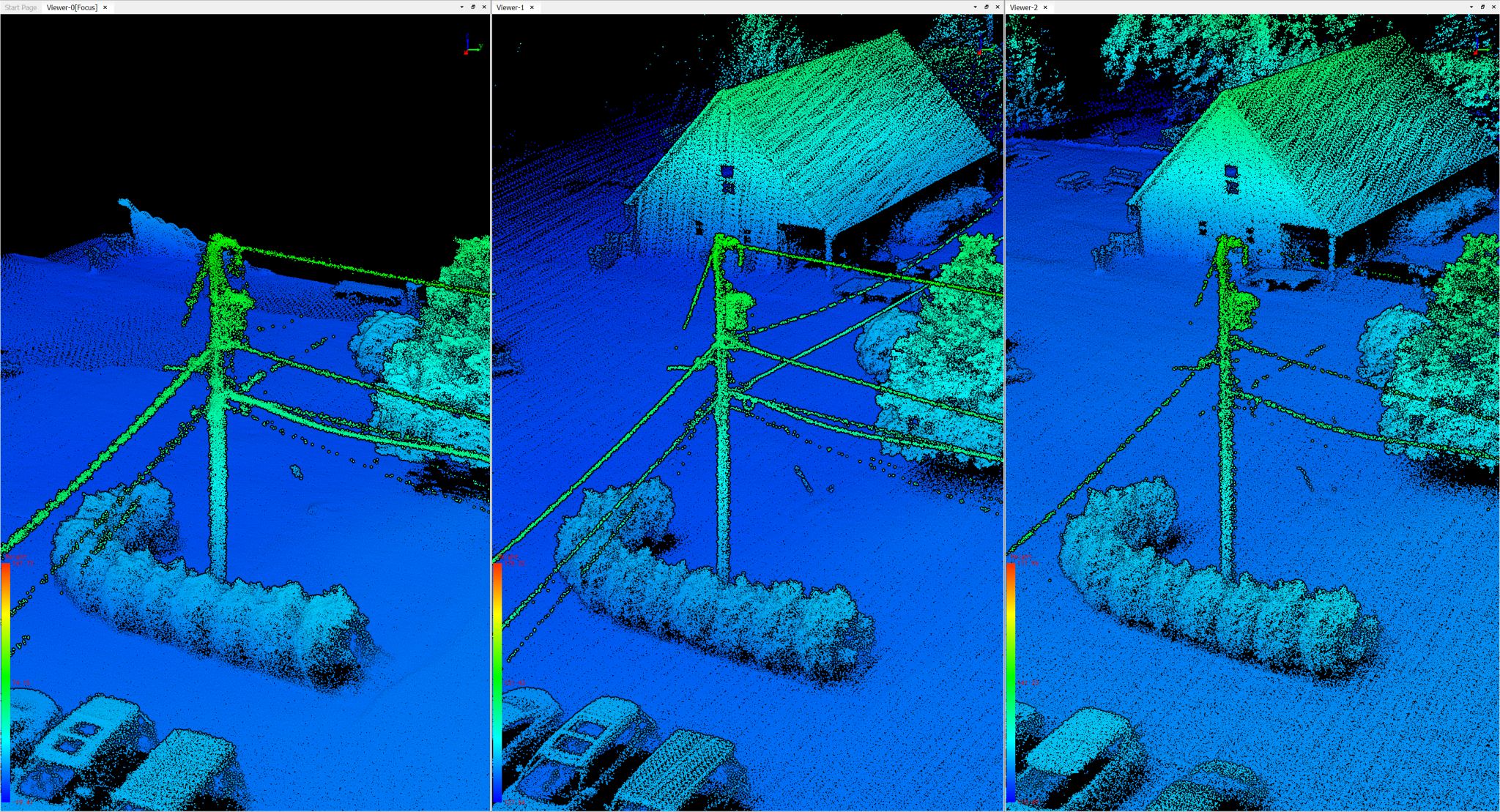
This is the most important criterion that will determine the accuracy of the user’s maps. Since additional sensors such as LiDAR or cameras are often used for mapping, the slightest inaccuracy in determining the vehicle’s angles and the data collection system will lead to significant errors in mapping.
As was said in the previous section, one of the features of INS operation is the accumulation of errors in the absence of external correction sources, such as GNSS. Unique methods and algorithms, such as Tightly Coupled, improve the system’s accuracy and reliability.
Tightly Coupled is a variant of the INS architecture that uses a standard Kalman filter to estimate INS errors, Figure 2. “The difference between the pseudo-range and pseudo-range rate measurements from the GPS and corresponding values predicted by the INS are fed to the KF to estimate the errors in the INS. The output from the INS is then corrected for these errors to obtain the integrated navigation solution. It is possible to use either pseudo-range or pseudo-range rate measurements, but often both are used because they are complementary.” [6].
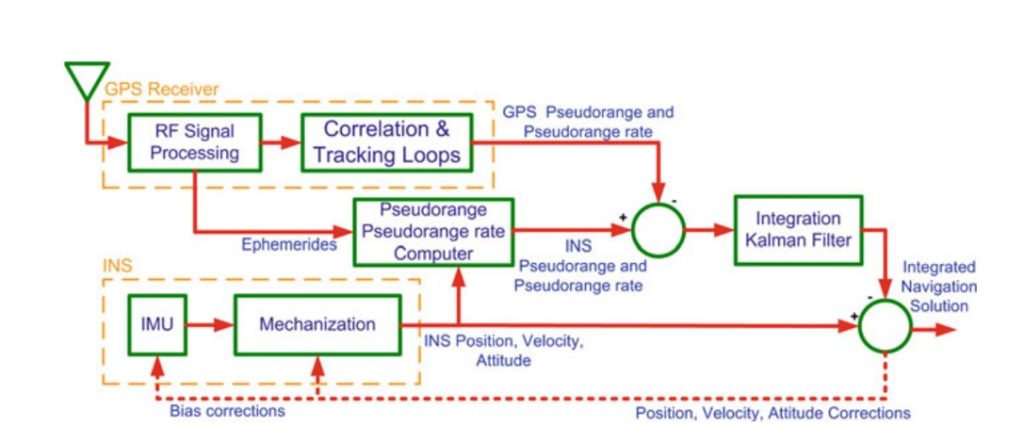
Figure 2. Tightly Coupled architecture.
“The tightly coupled integration eliminates the problem of correlated measurements arising from cascaded Kalman filtering in the loosely coupled approach. Furthermore, this integration provides a GPS update even if fewer than four satellites are visible. This is useful because a typical real-life trajectory includes urban environments, thick forest canopies, and steep hills where the number of visible satellites can drop to fewer than four.” [6].
Compatibility with other sensors
Another integration approach is Sensor Fusion [7]. Sensor Fusion involves using additional sensors, which are the information used to correct INS in the absence of GNSS. Such sensors include encoders, odometers, barometers, Doppler Velocity Log (DVL), etc. [8].
Since mobile mapping involves using a car (although it is not the only option), we recommend paying attention to INS support Sensor Fusion, particularly odometry, which is used to determine distance based on the rotation of the vehicle’s wheels. Also, a helpful addition would be using DVL to determine speed. Sensor Fusion is an excellent addition to your INS correction without a GNSS signal, especially if you plan to work outside.
Operating conditions and reliability
Mobile mapping can take place in a variety of locations and conditions. It can be dry, wet, cold, or hot climates. When choosing a system, it is essential to be sure that no conditions, even the most difficult ones, will affect its operation.
Therefore, when choosing an INS, you should consider its protection level. According to IEC 60529 standards, the protection level code is “IPXX” [9]. It is essential that the INS is protected from moisture and dust, as well as from impacts. It is equally important to know the average service life of the system.
Cost and long-term benefit
When choosing an INS, accuracy is essential, but so is price. It is only sometimes worth paying more for higher accuracy, as some INS may offer data with more accuracy than required. Generally, the higher the accuracy, the higher the cost, so you may pay more than you need. A system that costs twice as much will be less accurate. Therefore, it is recommended that you analyze the entire range and determine what accuracy and features you need. This will allow you to save money by excluding features and functions you do not need.
Recalibration required during service life
The IMU has features such as a transfer coefficient (scale factor), zero offset, cross-links, and other parameters. In addition, when installing sensitive elements in the IMU, due to instrumental manufacturing errors, there are mismatches between the sensitivity axes of the elements and the base axes of the unit. To ensure high accuracy of the INS, it is necessary to have highly accurate information from the measuring devices, which can only be ensured by considering the specified features of each accelerometer and gyroscope. Calibration consists of determining the parameters of the measuring devices to compensate for instrumental errors in the navigation mode. The accuracy of the output orientation parameters depends on the quality of the INS calibration.
Calibrations are usually performed on special high-precision stands that provide the operating temperature range according to the declared characteristics of the system. This is important because not only instrumental errors affect accuracy but also temperature.
Many manufacturers provide information about the need for recalibrations, which is often a paid service; at the same time, there is a high probability that you will have to send the INS back to the manufacturer, which will lead to downtime, thereby depriving you of profit. In this regard, when choosing an INS, you should carefully study these nuances to reduce the risks of losing time and money in the future.
Now that we’ve covered five essential criteria let’s look at what Inertial Labs offers and why it’s the best choice for mobile mapping.
Section 3. Mobile mapping INS from Inertial Labs
The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System – INS is a new generation of fully integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU, and L-Band navigation and high-performance strapdown system that determines position, velocity and absolute orientation (Heading, Pitch, and Roll) for any device on which it is mounted. Horizontal and Vertical Position, Velocity, and Orientation are determined with high accuracy for both motionless and dynamic applications.
The professional model of INS, the INS-P, utilizes an embedded, high-precision, gyro-compensated magnetic compass, which allows the navigation system to measure and output high-precision Heading without GNSS signal even in extreme environmental conditions (temperature, vibration, interference from external magnetic field), Figure 3 [10].
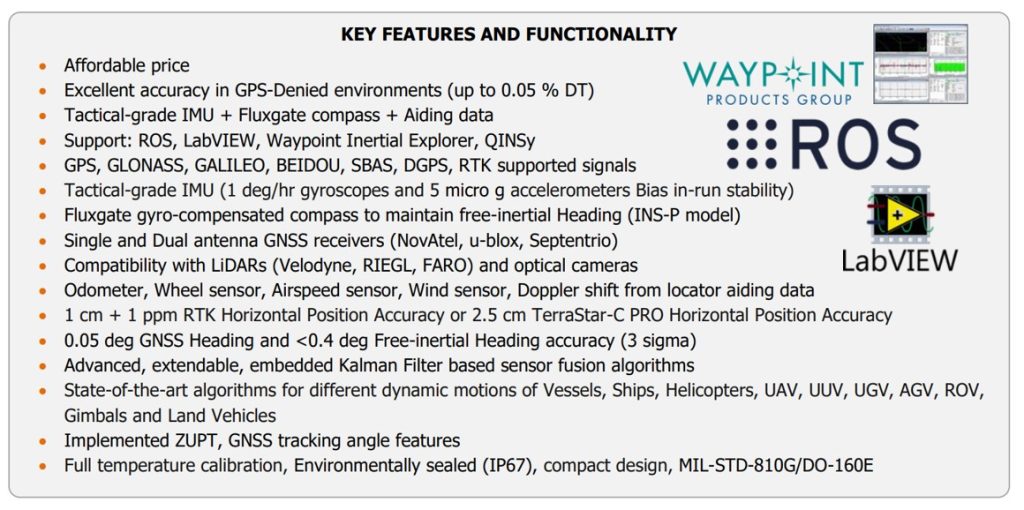
Figure 3. The INS-P.
Systems have Tightly Coupled support and Sensor Fusion to provide the user with reliable and accurate data in conditions of GNSS signal loss, Figure 4. All systems have an IP67 protection class, guaranteeing uninterrupted operation even in the harshest conditions. The average service life of the systems is more than 10 years, and the user does not have to worry about recalibrations since the factory calibrations are enough for the entire operating life.
Figure 4. Technical characteristics and functionality of INS from Inertial Labs.
The reliability of the systems is confirmed by military standards MIL-STD-810 and RTCA-DO-160E. Therefore, we guarantee stability and failure-free operation over a wide temperature range (-40 to +75 C).
We offer a wide range of systems and the ability to customize them to your needs, so you don’t pay for what you don’t need.
The Inertial Labs team of skilled engineers provides expertise to help users select and configure from the available models. Our support team helps set up units for all application bases to satisfy GNSS-enabled and GNSS-denied environments.
Conclusion
In conclusion, choosing an inertial navigation system (INS) for mobile mapping requires a balanced approach that balances accuracy, cost, functionality, and system compatibility. Understanding the specific project requirements and carefully analyzing available solutions will help you avoid unnecessary costs and select the most appropriate device to provide optimal performance without overpaying for unnecessary features.
Additionally, the capabilities of inertial systems from Inertial Labs are reviewed. With extensive integration capabilities, support for external sensors, accuracy, and reliability, these systems are an excellent choice for mobile mapping.
Among the many developers, Inertial Labs™ stands out for offering customizable solutions that meet the unique needs of different applications. Their systems are designed to be easily integrated with a wide range of external sensors, allowing for flexibility that improves system performance and simplifies user integration. This approach not only simplifies development but also significantly reduces the associated costs.
References
[1] Wikipedia Contributors. “Inertial Navigation System.” Wikipedia, Wikimedia Foundation, 21 May 2019, en.wikipedia.org/wiki/Inertial_navigation_system.
[2] Aboelmagd Noureldin. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration. Heidelberg, Springer, 2013.
[3] Wikipedia Contributors. “Kalman Filter.” Wikipedia, Wikimedia Foundation, 27 Mar. 2019, en.wikipedia.org/wiki/Kalman_filter.
[4] Mendez, Maria. “Integrating INS with Aiding Data Technologies – the INS Ecosystem RoadMap.” Inertial Labs, 29 Apr. 2024, inertiallabs.com/integrating-ins-with-aiding-data-technologies-the-ins-ecosystem-roadmap/. Accessed 25 Sept. 2024.
[5] Wikipedia Contributors. “Inertial Navigation System.” Wikipedia, Wikimedia Foundation, 21 May 2019, en.wikipedia.org/wiki/Inertial_navigation_system.
[6] Aboelmagd Noureldin. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration. Heidelberg, Springer, 2013.
[7] Wikipedia Contributors. “Sensor Fusion.” Wikipedia, Wikimedia Foundation, 30 June 2019, en.wikipedia.org/wiki/Sensor_fusion.
[8] Mendez, Maria. “Integrating INS with Aiding Data Technologies – the INS Ecosystem RoadMap.” Inertial Labs, 29 Apr. 2024, inertiallabs.com/integrating-ins-with-aiding-data-technologies-the-ins-ecosystem-roadmap/. Accessed 25 Sept. 2024.
[9] “IEC 60529:1989+AMD1:1999+AMD2:2013 CSV.” Webstore.iec.ch, 2015, webstore.iec.ch/en/publication/2452.
[10] “INS – GPS-Aided Inertial Navigation Systems.” Inertial Labs, 13 Aug. 2024, inertiallabs.com/products/ins-inertial-navigation-systems/. Accessed 25 Sept. 2024.