

Abstract
Most LiDAR users wonder, «Why use an INS with a LiDAR? ». To obtain a point cloud with high precision georeferencing, it is necessary to know the location and orientation of the LiDAR in a geographic coordinate system. For this, LiDAR is integrated by an inertial navigation system that determines the location and orientation of LiDAR. This article discusses the principle of georeferencing LiDAR using INS and why orientation accuracy is essential.
The sections will cover Introduction to LiDAR, LiDAR georeferencing, and RESEPI – LiDAR implementation using INS. The conclusion will summarize what LiDAR is used for in conjunction with INS.
Section 1. Introduction to LiDAR
Light Detection and Ranging (LiDAR) technology is a technology whose principle is based on emitting multiple laser pulses and measuring the time they return to a LiDAR receiver. Pulses of light are emitted along a stripe called a scan line. Since pulses travel a distance at the speed of light, a known value, it is not difficult to determine the distance of each pulse to the object from which it was reflected, for example, a tree. The lidar system creates a 3D point cloud of the environment by repeating the process for many pulses. The resulting data is processed to create accurate maps, terrain models, or three-dimensional images of objects.
Due to the advantages of this technology, LiDAR has found wide applications in mapping, power line analysis, forest and biomass monitoring, construction, mining, and much more.
Section 2. LiDAR georeferencing
LiDAR can only measure distance locally, i.e., from its location to the object. To better understand how this works, see Figure 1, which shows the coordinate system associated with LiDAR.
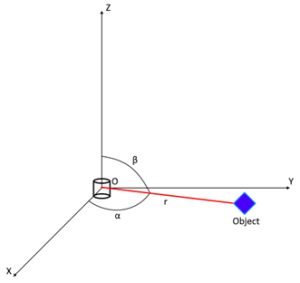
Figure 1. Spherical coordinate system associated with LiDAR.
OXYZ coordinate system with the LiDAR emitter and receiver, then the origin will be at point O (0,0,0), and all distances measured by LiDAR will be measured relative to this point. In this case, the coordinates of the object can be determined using the following formulas:
In this case, LiDAR is a regular rangefinder or laser tape measure. Also, this principle is used for simultaneous localization and mapping (SLAM) [1]. SLAM is used in mobile autonomous tools to construct a map in an unknown space or update a map in a previously known space while monitoring the current location and path traveled. However, for geodesy tasks, it is necessary to understand the coordinates of objects in the geographic coordinate system.
An Inertial Navigation System (INS) [2] is used for this. INS has become the basis of navigation systems for modern mobile objects. This is because they provide complete information about the navigation parameters of movement – heading, pitch, roll angles, acceleration, speed of movement, and coordinates of the object’s location. Moreover, they are entirely autonomous, i.e., they do not require any information from outside. To compensate for the accumulating errors inherent in INS in orientation angles and coordinates, data from other navigation systems, particularly the Global Navigation Satellite System (GNSS). Integrating data from various navigation systems uses an algorithm based, as a rule, on the Kalman filter [3].
In its modern version, INS consists of two modules:
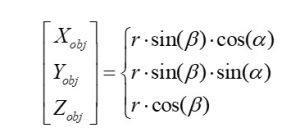
- Inertial Measurement Unit (IMU) – a module containing gyroscopes and accelerometers that determine accelerations and orientation angles, Figure 2 [4].
- GPS
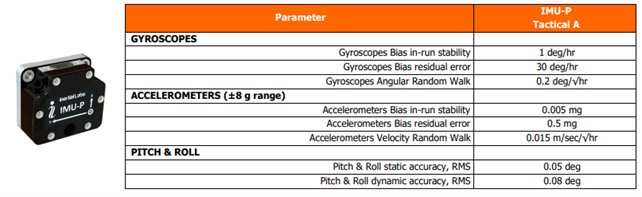
Figure 2. Specifications of the high-precision IMU used in RESEPI.
When integrating LiDAR with the INS system, its tilt angles, speeds, and coordinates in the geographic coordinate system will be known, Figure 3. Figure 3 shows a geometric image of georeferencing LiDAR [5].
Figure 3. Geometric georeferencing image LiDAR.

Where:
![]() – georeferenced position of the laser point. Position can be derived through the summation of four vectors
– georeferenced position of the laser point. Position can be derived through the summation of four vectors ![]() ,
, ![]() ,
, ![]() , and
, and ![]() , after applying the appropriate rotations
, after applying the appropriate rotations  ,
,  ,
,  , and RESEPI Payload can additionally project geographic coordinates on a plane, thus providing a point cloud with cartographic reference, which is convenient for building digital maps (e.g., UTM projection) [6].
, and RESEPI Payload can additionally project geographic coordinates on a plane, thus providing a point cloud with cartographic reference, which is convenient for building digital maps (e.g., UTM projection) [6].
![]() – is the vector from the GPS to the IMU coordinate system.
– is the vector from the GPS to the IMU coordinate system.
 – is the vector from the ENU to the GPS antenna position.
– is the vector from the ENU to the GPS antenna position.
![]() – Is the vector offset between the LiDAR and IMU coordinate systems (lever-arm offsets).
– Is the vector offset between the LiDAR and IMU coordinate systems (lever-arm offsets).
![]() – the laser range vector’s magnitude is equivalent to the distance from the laser firing point to its footprint.
– the laser range vector’s magnitude is equivalent to the distance from the laser firing point to its footprint.
– The rotation matrix relates to the ENU and IMU coordinate systems.
– the rotation matrix relating the IMU and LiDAR coordinate systems (bore-sighting angles).
– refers to the rotation matrix relating the laser unit and laser beam coordinate systems, with α and β being the mirror scan angles.
LiDAR and INS combine to manufacture a new system by which each point can be georeferenced with centimeter-level precision and accuracy [7].
Section 3. RESEPI – LiDAR implementation using INS
In practice, the following way to use the LiDAR and INS system is to collect LiDAR and INS data during the mission, which can be a car ride (MMS) or a flight (Aerial scanning). Then, in post-processing, the data from the INS is used to georeference each LiDAR point. This decision is because processing large volumes of data in real-time is impossible. After all, Low-power computing modules are used to collect data. In addition, post-processing reduces GPS + INS errors. In this way, centimeter accuracy of georeferencing of each point is achieved.
An example of a georeferenced LiDAR system is RESEPI from Inertial Labs [7]. RESEPI is compact and customizable to fit various use cases. Users can choose configurations that include a camera, LiDAR model, and GNSS receiver. It is most used on drones and small unmanned aircraft systems (sUAS). After LiDAR payloads collect data, it’s essential to post-process the raw data before obtaining the point cloud. Inertial Labs has developed specialized software for this purpose – PCMasterPro [8]. This software is easy to use, and all operations are performed semi-automatically. The entire system is designed to make it as easy for users to work with it.
To improve data quality, PCMasterPro implements a PPK post-processing solution that automatically reduces errors associated with GPS and INS, allowing for position accuracy of about 0.5 cm, Heading accuracy of 0.03 o, Pitch/Roll accuracy of 0.006 o, Figure 4 [9].
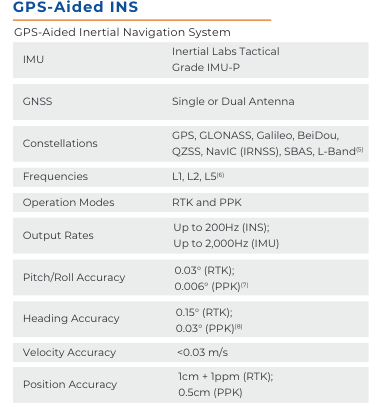
Figure 4. Accuracy of orientation and position angles.
Thus, the combination of INS and LiDAR produces a georeferenced point cloud, making it possible to use LiDAR for mapping, monitoring, etc.
Before using RESEPI Payload, the user must have a drone and flight license, a base station, and a PCMasterPro software license for data processing [10].
Conclusions
Despite LiDAR’s ability to accurately determine distances, it cannot provide georeferenced data without an inertial navigation system. In this case, it can only operate in a local coordinate system as a laser rangefinder or using SLAM technology to construct a map in an unknown space.
Without LiDAR orientation and coordinates on the Earth, obtaining a geo-referenced point cloud is impossible. Therefore, the LiDAR is complexed by the INS, which determines the tilt angles, velocities, and coordinates of the LiDAR. This ensures that each point in the point cloud has the coordinates of a geographic coordinate system. During the mission, the system collects data, which is then post-processed to georeference and improve accuracy to 5 mm.
Whether it is hardware or software needs, RESEPI from Inertial Labs offers solutions to produce accurate and precise point clouds. With RESEPI Payload, the user can create accurate centimeter point clouds with a map projection of coordinates.
Reference
[1] Wikipedia Contributors. “Simultaneous Localization and Mapping.” Wikipedia, Wikimedia Foundation, 8 July 2019, en.wikipedia.org/wiki/Simultaneous_localization_and_mapping.
[2] Wikipedia Contributors. “Inertial Navigation System.” Wikipedia, Wikimedia Foundation, 21 May 2019, en.wikipedia.org/wiki/Inertial_navigation_system.
[3] Wikipedia Contributors. “Kalman Filter.” Wikipedia, Wikimedia Foundation, 27 Mar. 2019, en.wikipedia.org/wiki/Kalman_filter.
[4] High Performance Advanced MEMS Inertial Measurement Units.
[5] Bang, Ki, et al. LiDAR System Calibration Using Point Cloud Coordinates in Overlapping Strips. American Society for Photogrammetry and Remote Sensing Annual Conference. 2009, pp. 2009–2010.
[6] “Universal Transverse Mercator Coordinate System.” Wikipedia, 10 May 2021, en.wikipedia.org/wiki/Universal_Transverse_Mercator_coordinate_system.
[7] “RESEPI – LiDAR Payload & SLAM Solutions.” RESEPI, 12 July 2024, lidarpayload.com/. Accessed 26 Aug. 2024.
[8] Inertial Labs. “RESEPI Quick-Start Guide – Setting up Your LiDAR Survey System and PCMaster – Inertial Labs.” YouTube, 4 Aug. 2022, youtu.be/AygQTBVNrKw. Accessed 3 June 2024.
[9] “RESEPI Velodyne VLP-32C.” RESEPI, 28 Mar. 2024, lidarpayload.com/home/resepi-velodyne-vlp-32c/. Accessed 26 Aug. 2024.
[10] “Buy Reach RS2+ | Buy Multi-Band RTK GNSS Receiver.” Emlid Store US, store.emlid.com/products/reach-rs2-plus?variant=47253689467185. Accessed 3 June 2024.