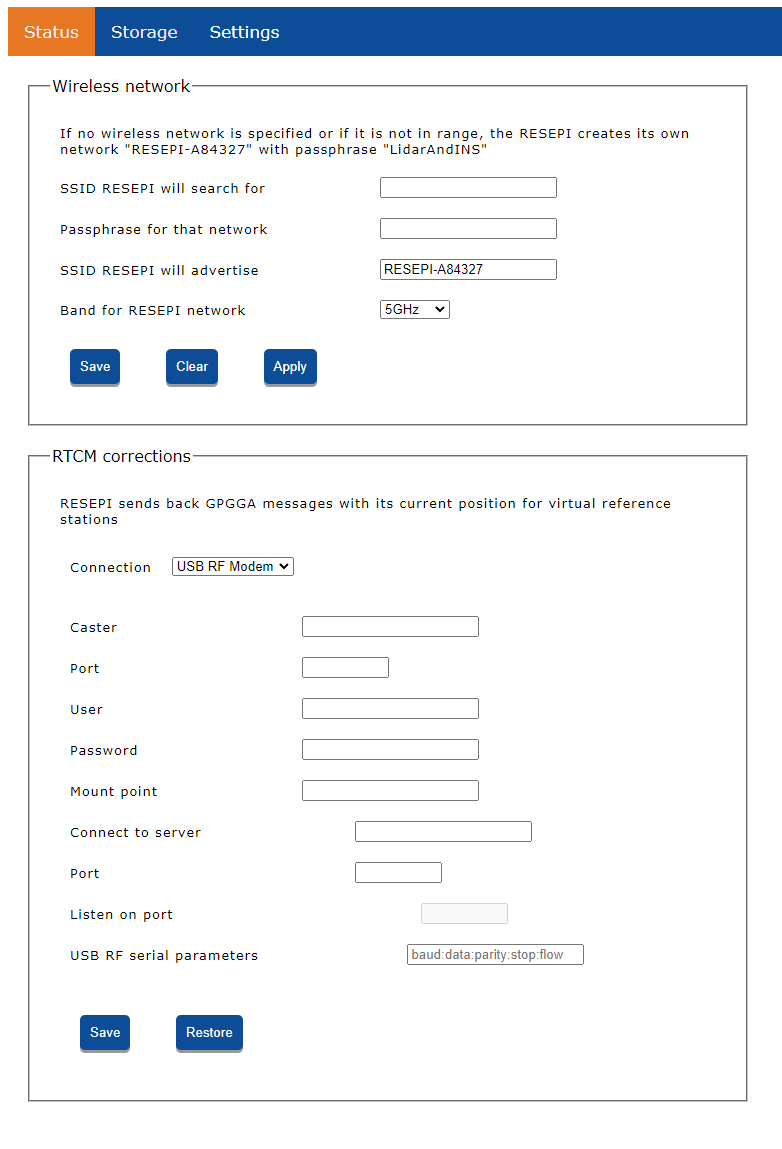
In the options for “RTCM Corrections” the user can choose the delivery method for corrections to the payload, as shown in Figure 11. The options are:
- USB RF Modem like Holybro 915MHz
- NTRIP Client
- TCP Server the payload connects to
- TCP Client connecting to the payload’s pre-defined port.
Click “Save” to save the changes. The payload will immediately start trying to connect to the selected channel.
- If “TCP Listen” is selected, the payload will always listen on the port, and once a client connects to the port, the payload will accept the connection.
- If “USB RF Modem” is selected, the payload will automatically detect connection of a compatible USB RF Modem and open the serial link.
- If “NTRIP Client” or “TCP Connect” is selected, the payload will keep trying to connect to the specified address until it succeeds.
Once a connection is established, the payload will start sending its position in a NMEA0183 $GPGGA message, so a virtual reference station can be generated. Real base stations ignore those messages. Once the payload receives RTCMv3 corrections, it will use them to compute RTK position. It will also record the RTCMv3 messages it has received while recording data, so they can be used for post-processing as well.
Click “Restore” to discard any unsaved changes