
SLAM Mission Step-by-Step #
This guide walks you through the full process of performing SLAM (Simultaneous Localization and Mapping) scans using a RESEPI payload, including LITE, Ultra LITE, and GEN-II models with 360 degree laser support. It covers setup, initialization, scanning procedure, and data retrieval for both GNSS denied and georeferenced missions.
1. Powering the RESEPI Unit #
- Power Connections:
- Use one of the supported input connectors:
- XT60
- Skyport/Other
- Binder connector
- Ethernet (GEN-II only)
- Power specs:
- 9–36 VDC (up to 45 V supported)
- 24–28 W consumption
- Use one of the supported input connectors:
- Insert USB Drive:
- Plug the provided USB into the RESEPI device.
- Not required during recording for GEN-II models.
- Plug the provided USB into the RESEPI device.
- Turn On the Unit:
- Press the power button to boot the device.
2. Connecting to the RESEPI Web Interface #
- Connect via Wi-Fi:
- Connect a phone, tablet, or computer to the RESEPI’s Wi-Fi.
- SSID: Listed on the device label
- Password: LidarAndINS
- Connect a phone, tablet, or computer to the RESEPI’s Wi-Fi.
- Access Web Interface:
- Open a browser and go to: 192.168.12.1
- Update Settings:
- Navigate to the Status window to configure the SLAM Settings menu
- This is optional, but recommended for faster post processing workflow
- If not using Outdoor (georeferenced) or Indoor (non-georeferenced) settings, the user can use custom settings in PCMasterPro SLAM window
- Click Save
- Navigate to:
- Settings > Geometry > Vehicle to IMU Rotation
- Set values: Yaw: 0, Pitch: 90, Roll: 0 – for standard configuration
- Click Save
- Settings > Geometry > Vehicle to IMU Rotation
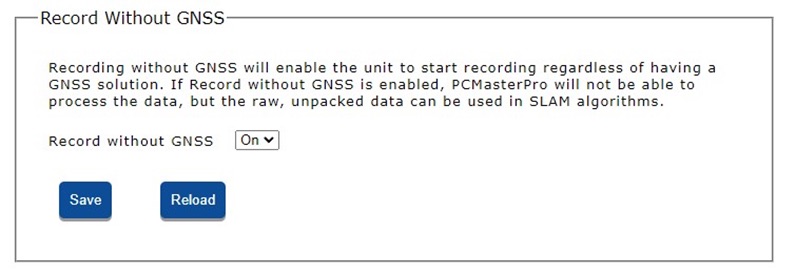
- For GNSS denied scans:
- Go to Status Tab > Record Without GNSS
- Enable “Record Without GNSS”
- Click Save
- For georeferenced scans:
- Go to Status Tab > Record Without GNSS
- Disable “Record Without GNSS”
- Click Save
- Navigate to the Status window to configure the SLAM Settings menu
3. GNSS and Time Fix Requirements #
SLAM missions may or may not require GNSS depending on your hardware and whether the data needs to be georeferenced.
RESEPI LITE & Ultra LITE (GNSS Denied Use) #
- No GNSS setup is required.
- You may skip the time fix steps and proceed directly to data collection.
RESEPI GEN-II #
- Connect the GNSS antenna before starting.
- Begin the procedure outdoors with clear satellite visibility.
- Wait for a valid time fix before scanning:
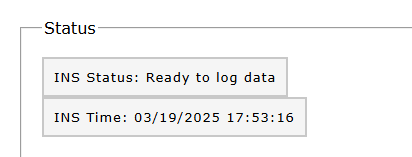
- In the Web UI, verify the INS status window.
- A successful fix is indicated by:
- The correct current date/time
- Status: “Ready to log”
Once this message appears, scanning (including indoors) can begin.
Georeferenced SLAM (All Models) #
- GNSS time fix is required.
- Start and preferably end the mission outdoors in GNSS-friendly conditions (clear sky, minimal obstructions).
- Confirm “Ready to log” status in the Web UI before proceeding, as shown below.
4. Starting a SLAM Scan #
- Begin Recording:
- In the Status window, press “Start”
- Alternatively, tap the power button to begin data logging.
- IMU Initialization:
- Keep the RESEPI completely still for 10 seconds to allow IMU alignment.
- Avoid motion during this period.
5. Scanning Procedure #
- Motion Guidelines:
- Walk smoothly and avoid jerky movements or prolonged immobility.
- Avoid rotating or swinging the unit wildly.
- System supports speeds up to 30 mph, but slower is ideal.
- Loop Closures:
- Plan your route to return to the starting area, creating a loop closure, as demonstrated below.
- Closing the loop between start and end is most critical for high-accuracy results.
- You may loop around other significant areas, but avoid excessive looping, which may interfere with SLAM relocalization.
- Plan your route to return to the starting area, creating a loop closure, as demonstrated below.

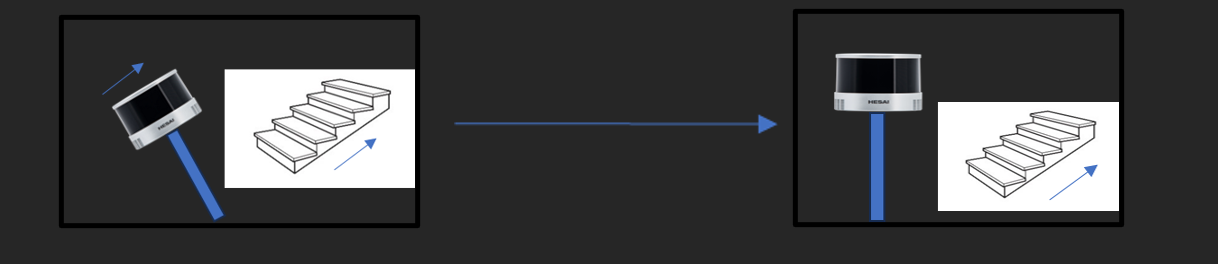
- Elevation Changes:
- Briefly adjust the unit’s angle to follow the terrain, then resume level scanning, as shown below.
6. Ending the SLAM Scan #
- Final Static Alignment:
- Hold the unit still for ~5 seconds to help finalize IMU alignment.
- Stop Recording:
- Use the Web UI “Stop” button.
- Or press the Power Button again.
7. Shutting Down the Device #
- Standard Shutdown:
- Press “Shutdown” in the Web UI
- Or hold the Power Button for 4 seconds
- Emergency Shutdown:
- Hold the Power Button for 10 seconds
- Note: This may interrupt logging — only use if necessary.
8. Retrieving and Processing SLAM Data #
- For GEN-II devices only, navigate to Storage and transfer the dataset from internal to USB storage
- Remove the USB drive
- GEN-II: Ensure transfer to USB is fully completed before removal
- Transfer files to your computer.
- Use PCMasterPro software to post-process and generate point clouds.
Best Practices & Notes #
Data Quality Tips #
- SLAM performance depends on what the LiDAR “sees.”
- Avoid power button use for starting/stopping recordings to reduce unnecessary motion
- Avoid scanning featureless or reflective areas — structure and texture are helpful.
- In visually complex environments (e.g., pipes, beams, tight spaces):
- Move slowly and steadily.
- Allow the sensor time to collect overlapping keyframes.
XT-32, XT32-M2X LiDAR Users #
- In dense metallic or structured areas (e.g., stadiums, framing, HVAC systems, temporary structures):
- Go to LiDAR Service Tab for LITE/Ultra LITE or GEN-II in Web UI and enable Interstitial Points Filtering
- This removes stray points and improves SLAM precision.
- Go to LiDAR Service Tab for LITE/Ultra LITE or GEN-II in Web UI and enable Interstitial Points Filtering